

|
《Automotive Innovation》是中国汽车工程学会主办,与施普林格联合出版并全球发行、反映汽车工程高学术水平和技术进展的国际性期刊。 本期《Automotive Innovation》通讯,内容包括两个方面: 1. 好文推荐:《Automotive Innovation》智能汽车和电动汽车相关的3篇文章 2. China SAE近期动态: · 首期Automotive Innovation Workshop成功举办并全球直播 · 张进华:汽车技术融合发展趋势 · 2021中国汽车产销分析 · SAECCE开始论文征集 |

    |
基于道路消失点导向的危险小物体检测 论文作者:Guang Chen, Kai Chen, Lijun Zhang, Liming Zhang & Alois Knoll |
||
| 先进的深度学习技术极大促进了自动驾驶中物体检测技术的发展,然而由于缺乏大规模的小物体数据集和研究方法,远距离检测小型道路危险物仍然是一个挑战。本文从两个方面解决了这一挑战。首先,引入了一个远距离道路物体数据集(TJ-LDRO),该数据集由109,337张图像组成,是迄今为止小型道路物体检测研究的最大数据集。其次,提出了一个基于道路消失点的感知网络(VCANet),它利用消失点预测模块和感知中心检测模块获得语义信息。在VCANet中引入了多尺度特征融合管道和上采样模块来增强感兴趣区域(ROI)的特征。用TJ-LDRO数据集进行试验,结果表明,所提出的方法比典型物体检测方法性能更好。本文填补了高速自动驾驶汽车道路危险小物体检测方面的空白。 | |||
|
关键词:自动驾驶, 道路障碍物, 物体检测, 深度学习, 消失点 本文是同济大学陈广团队与慕尼黑工大Alois Knoll团队开展的研究,引用词条如下: Chen, G., Chen, K., Zhang, L. et al.: VCANet: Vanishing-Point-Guided Context-Aware Network for small road object detection. Automot. Innov. 4(4), 400–412 (2021) |
|||
| 阅读全文>> | |||
 |
基于五阶容积卡尔曼滤波的锂离子电池SOC预估方法 论文作者:Lin Zhang, Qiang Meng, Hong Chen, Yanjun Huang, Yang Liu & Konghui Guo |
||
| 新能源汽车的快速发展带动了动力电池技术的突破。锂离子电池因具有高比能、长寿命、高安全等特性,在新能源汽车上获得了广泛应用。然而,锂离子电池荷电状态(SOC)预估在动态时变工况条件下存在精度差、噪声干扰强、鲁棒性差等问题。针对上述难题,本文提出了一种基于自适应优化的五阶容积卡尔曼滤波器的锂离子电池SOC预估方法。首先,建立了电池二阶等效电路模型描述电池静动态特性,建立粒子群算法结合脉冲测试对模型进行参数辨识,构建滤波估计算法用于完成SOC估计。其次,针对实车环境下存在的干扰问题,开展了仿真测试进行研究,在初值干扰、采样干扰等条件下均可达到较好的精度与稳定性,验证了算法的有效性。主要结论为:静态运行时,所提方法的SOC最大预估误差为3%;动态运行时,SOC最大预估误差为5%;在初始误差扰动下,所提方法具有较好的收敛性和鲁棒性,表明了在电动车实际动态工况下的应用潜力;本文所提方法可用于云计算系统在线预估SOC,在电动车中具有多样化的应用前景。 | |||
|
关键词:五阶容积卡尔曼滤波器,参数识别,等效电路模型,充电状态,锂离子电池 五阶容积卡尔曼滤波器,参数识别,等效电路模型,充电状态,锂离子电池,引用词条如下: Yi, H., Yang, S., Zhou, S. et al.: An innovative state-of-charge estimation method of lithium-ion battery based on 5th-order Cubature Kalman Filter. Automot. Innov. 4(4), 448–458 (2021) |
|||
| 阅读全文>> | |||
 |
集成主动轮系统的直线型振动能量回收装置设计、建模与特性研究 论文作者:Xin Wen, Yinong Li & Chao Yang |
||
| 电动汽车能量损失的一个主要来源是减震器在不规则路面激励下耗散的振动能量,且在采用主动轮系统时,振动能量损失加剧。为此,设计了一款永磁直线电机作为主动轮系统的作动器,将这种振动能量转化为电能,并通过优化电枢结构参数改善了电机力学性能。通过理论模型和有限元模型探究了不同路面激励频率和幅值对永磁直线电机的电动势波形、发电功率、效率和阻尼力(根据负载条件)的影响,以及该模型的能量回收和非线性电磁力特性。最后根据电磁特性研究结果设计分级负载电阻控制器,实现了主动轮电磁悬架系统振动能量回收的自阻尼控制,在提高悬架系统动态性能的同时降低了车辆的能量损耗。 | |||
|
关键词:能量回收, 电动汽车, 主动轮系统, 自阻尼悬架 本文是重庆大学李以农教授团队开展的研究,引用词条如下: Wen, X., Li, Y. & Yang, C.: Design, modeling, and characterization of a tubular linear vibration energy harvester for integrated active wheel system. Automot. Innov. 4(4), 413–429 (2021) |
|||
| 阅读全文>> | |||

| 首期Automotive Innovation Workshop成功举办并全球直播 | |||
 1月18日,首期Automotive Innovation Workshop在线上成功召开。 会议由中国汽车工程学会和《Automotive Innovation》(AUIN)主办,由吉林大学汽车仿真与控制国家重点实验室和吉林大学汽车工程学院承办。本次国际研讨会为纯英文演讲,讨论了自动驾驶汽车相关技术,邀请了期刊主编和来自韩国、奥地利、英国的编委进行演讲交流。会议主席为AUIN执行主编、FISITA技术顾问、吉林大学马芳武教授和AUIN执行副主编、吉林大学汽车仿真与控制国家重点实验室副主任章新杰教授。会议通过中国汽车工程学会视频号、B站平台以及海外平台全球直播,观看量累计超过3.3万人次。  已注册报名Automotive Innovation Workshop的观众,可登录中国汽车工程学会知识中心,回看会议演讲。 更多信息,请点击 这里 查看。 |
|||
| 张进华:汽车技术融合发展趋势 | |||
 中国汽车工程学会常务副理事长兼秘书长张进华就“汽车技术融合发展趋势”这一话题,与大家分享几点看法: 汽车发展呈现车能融合、智能互联、智能共享多领域融合发展的鲜明特征: 一、车能融合加速汽车电动化转型,带动能源供给侧与消费侧变革。 二、智能互联成为汽车高度自动驾驶技术发展的必然,也是5G、人工智能、云计算等新技术的应用先导和牵引。 三、智能共享出行是未来新型汽车产业生态的平台和枢纽,也将成为数字经济、共享经济新业态的重要力量。 展望未来,汽车产业亟需突破创新边界,以融合创新支撑实现汽车产业链、创新链、价值链的升级再造:一是顶层战略引领;二是科技创新筑基;三是场景驱动落地;四是创新平台支撑;五是交流平台赋能。 详细内容,请点击此处查看。 |
|||
| 2021中国汽车产销分析 | |||
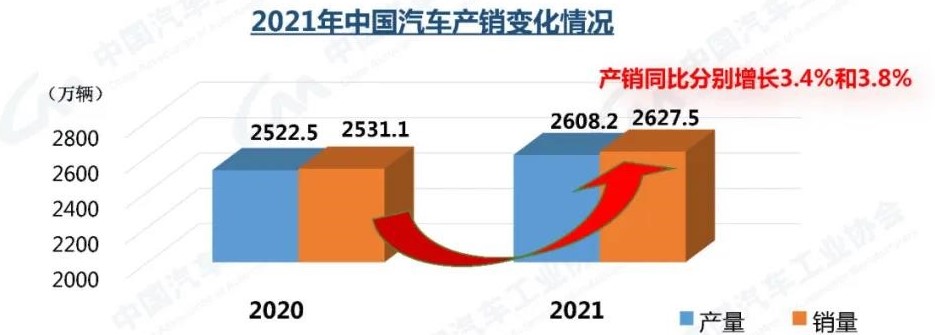 2021年我国汽车全年产量2608.2万辆,全年销量2627.5万辆。我国汽车产销总量已经连续13年稳居全球第一。全球汽车产量为9068万辆,中国占比28.8%;全球汽车销量为6600万量,中国占比39.8%。中国新能源汽车全年产量为354.5万量,全年销量为352.1万辆。全球新能源汽车销量631万辆,中国占比55.8%。 数据来源:中国汽车工业协会,Statista 更多信息,请点击 这里 |
|||
| SAECCE开始论文征集 | |||
 2022中国汽车工程学会年会暨展览会(SAECCE 2022)将于2022年11月举办。经过28届的发展,中国汽车工程学会年会暨展览会已成为汽车行业极具影响力、规格极高、企业/高校/科研院所广泛参与和认可的品牌年度盛会。 论文是年会的重要工作,年会组委会现面向全球汽车行业征集技术论文。 2022年预计征文1200余篇,录取600篇,将有100篇进入EI检索;预计邀请100篇论文在年会期间进行宣读交流,30篇论文到现场进行海报展示。 投稿及模板下载链接:http://www.saecce.org.cn/CN/essay/ 关键时间节点 论文提交截止日期:2022年4月25日 论文录取通知日期:2022年7月中旬 详细征文信息,请点击 这里 查看。 |

|
Automotive Innovation 《Automotive Innovation》作为由国家新闻出版署批准的中国汽车行业首个英文科技期刊,也是中国汽车工程学会(China SAE)为行业打造的重要国际交流平台和窗口,旨在进一步推动国际合作与交流,加速中国汽车创新成果走向国际,提升中国在国际汽车界的话语权。 自创刊以来,期刊就以建设世界一流期刊为目标,邀请全球15个国家和地区极具影响力的汽车领域专家担任编委,并与著名出版集团施普林格(Springer Nature)合作,以国际高标准确保论文水平和出版质量。期刊每季度出版1期,读者已涉及72个国家和地区,目前最高单篇下载次数超过19,000次。期刊已被ESCI、EI、Scopus等国际数据库收录。 期刊主要刊登汽车及出行领域范围内具有创新性的理论、方法研究,产品开发和工程技术应用等相关创新成果,涵盖智能网联汽车技术、新能源汽车技术、未来出行技术等领域。 主编 李骏,中国工程院院士,中国汽车工程学会理事长,清华大学教授 赵福全,世界汽车工程师学会联合会终身名誉主席,清华大学教授,清华大学汽车产业与技术战略研究院院长 执行主编 马芳武,吉林大学教授,FISITA副主席 |
||||
|
免费投稿及阅读 www.ChinaSAEJournal.com.cn www.springer.com/42154 联系方式: 中国汽车工程学会 陆丽俐女士 Tel: +86-10-50950101 Email: jai@sae-china.org |

|
|||
|
Sponsored by |
Published by
|
|||